
由中国汽车工业协会主办的第13届中国汽车论坛于2023年7月5日至7日在上海嘉定举行。本次论坛以“新时代”为基础 新使命 以新动能-帮助建设现代产业体系为主题,设立“一闭门峰会” 1个大会论坛 16个主题论坛 “N场发布”共有18场会议和多项发布、展示、推广等活动,旨在凝聚各方力量,形成发展共识,为建设现代产业体系贡献汽车产业的智慧和力量。在7月6日下午举行的“主题论坛一:第五届全球汽车技术发展领袖峰会”上,陈黎明,地平线总裁做主题演讲。以下内容为现场演讲记录:


各位嘉宾,各位嘉宾,下午好!
我很荣幸被中国汽车论坛邀请参加今天的峰会。我演讲的主题是“用户价值驱动,促进智能驾驶技术的创新和发展”。
在过去的一年里,整个自动驾驶可以用两个词来形容,一个是回归商业本质,另一个是用户价值驱动。
从许多调查数据来看,对于购车用户和使用过智能驾驶的用户来说,智能驾驶最基本的价值主要是安全、放心、放松、缓解疲劳,这是目前自动驾驶最简单、最迫切的需求。
从智能产品的价值来看,智能驾驶已经成为购买智能汽车的方式 TOP 3 因素,购买新动力汽车或电动汽车的用户已经决定了智能驾驶的先进性 TOP 2 要素。在整个市场上,人们越来越接受智能,对高级辅助自动驾驶的接受度和认可度也越来越高。
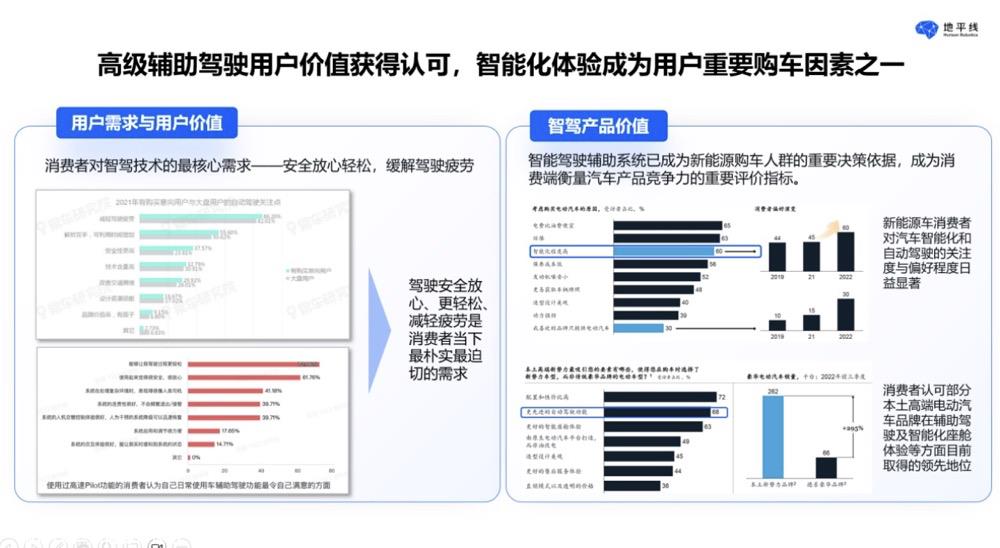
用户的价值是通过用户体验来实现的。然而,在目前的市场上,实际性能仍然参差不齐,有些地方每个人都觉得体验不好。
一是接管频率相对较高,使用范围相对有限。去年是高速公路 NOA 第一年,高速变道、超车等慢慢开始实现,以前更多的是在自行车道上的一些辅助驾驶,整个自动驾驶的控制感不那么平稳,包括启动、制动、转向等,性能不如老司机好。另一个成本性能还不够高,每个人花的钱有时与感觉不成比例。
在经验差距的背后,实际上是技术的挑战。
有许多挑战。简要总结几点:首先,现有算法不足以支持复杂场景的功能和性能。第二,现有硬件的有效计算能力和带宽不足以支持最先进的算法和大型模型,这也需要在硬件上进一步发展。第三,现有的软件架构不足以支持高度自动化的快速迭代,使整个开发成本高,开发周期长。

如何解决这些问题?在这里分享一些技术发展趋势,以及我们的一些思考和创新解决方案。
去年是高速 NOA 今年可能是城市的第一年 NOA 元年。目前很多公司都在积极研发,个别车型已经推向市场,今年会有更多的城市 NOA 产品投放市场。
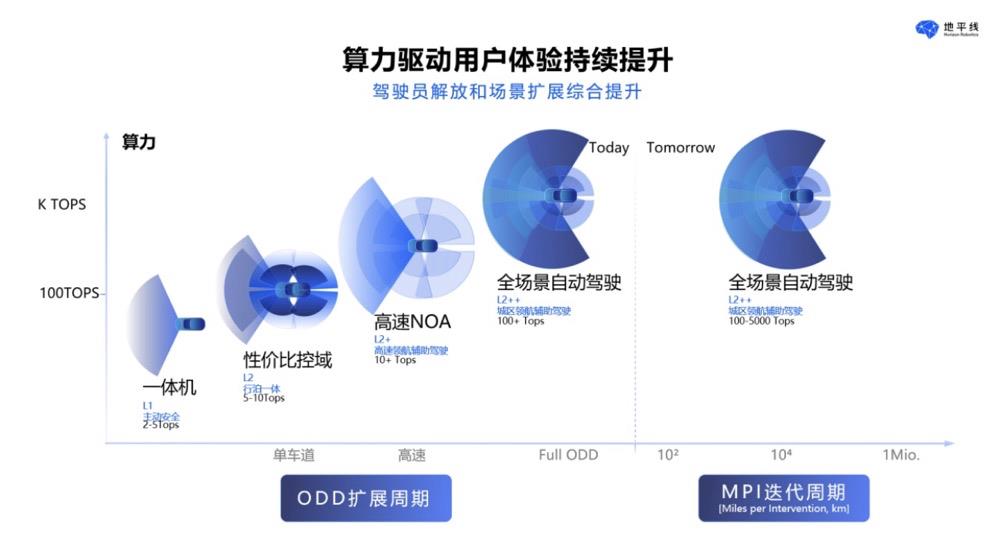
从整个发展路线来看,地平线一直被认为是逐步发展,逐渐接近用户体验的上限。现阶段最重要的是 ODD的扩展,也就是说,从单车道到多车道,从高速到城市,从简单的场景到复杂的场景,不断 ODD 扩展使用场景。
下一步将是提高接管性能。并不是说接管次数不重要,而是说目前的重点是扩展ODD。到 ODD 扩展到整个场景后,下一阶段的重点是如何提高百万公里接管次数的极限。
这就是地平线对发展路线的认知,我们也按照这样的发展路线开发设计我们的产品。
接下来,我们来分享一下开发范式的发展。
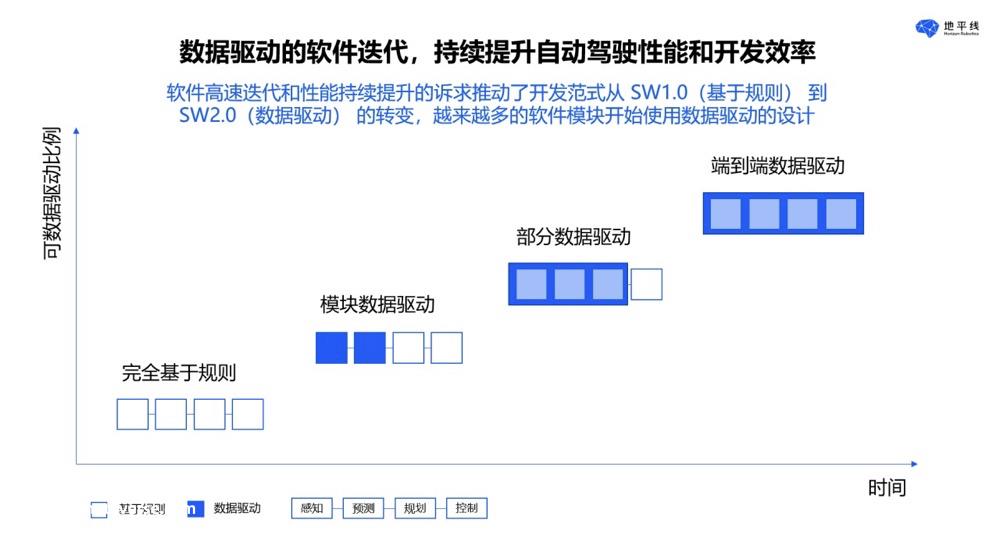
从 software 1.0 到 software 2.0,基于规则的算法已经遇到了它的上限,没有办法解决自动驾驶遇到的问题,很多感知相关的问题。
因此,深度学习应运而生,更多地应用于自动驾驶感知和其他模块。另一个趋势是在更多的模块中使用深度学习的神经网络。除了在模块中使用外,端到端大型模型的使用也在不断扩展。
这不断提高了整个自动驾驶的性能,大大提高了整个开发效率。
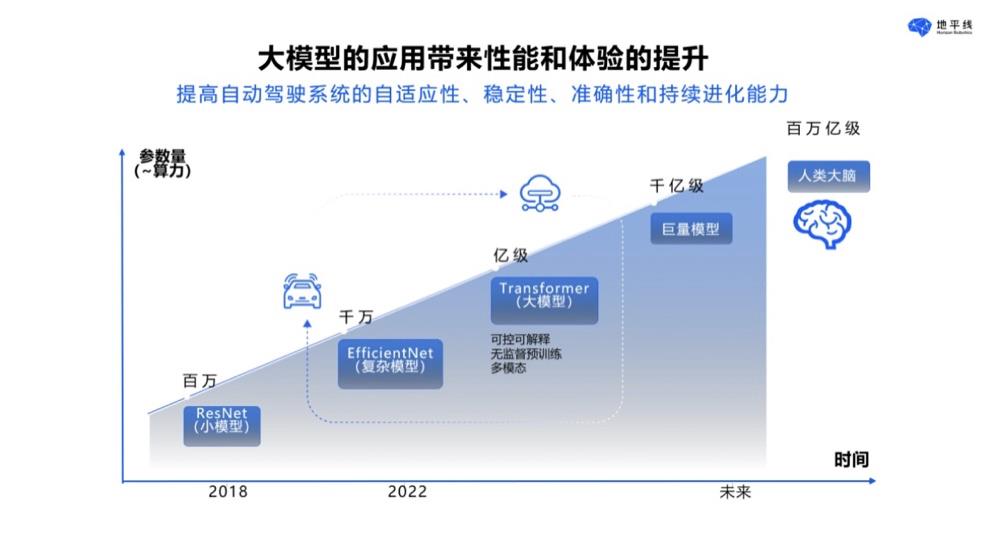
另一个是模型的不断变化。
从18 年的 ResNet 到 22 年的 EfficientNet,到现在 Transformer ,它已经是一个大模型了。参数的增加也意味着芯片计算能力需求的增加。
因此,开发范式算法和大模型算法的应用对整个计算能力提出了更高的要求。这是地平线观察到的技术发展趋势。
以下是智能芯片和计算方案中地平线的一些创新。
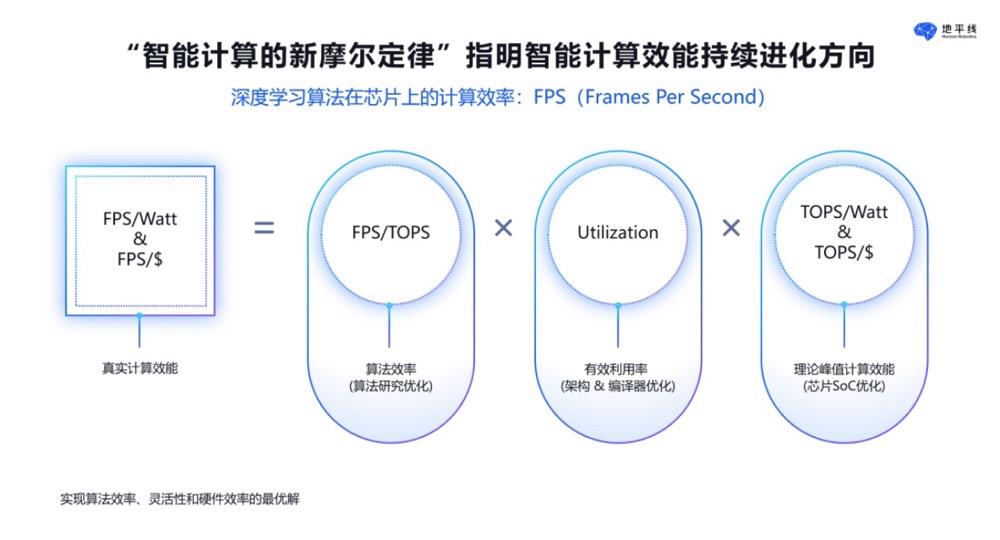
2016 2000年,地平线首先提出了关于智能计算的新摩尔定律。该定律实际上将计算能力、计算效率和计算效率的概念有机地结合在一起。
那么,什么是计算能力呢?计算能力通常被称为TOPS,而真正的计算效率是你每秒能处理多少帧图像。效率是你每美元的硬件投资,或者每美元 1 瓦的功耗对应的效率是多少?这才是真正的金银。
它分为算法、芯片架构和编译器三个元素。如何充分利用计算能力,支持左算法的需要,最终获得最终效率。找到一个提高芯片性能的方向。
下面我就从这些方向给大家简单介绍一下地平线的创新。
在今年的世界顶级计算机视觉会议CVPR会议上,地平线学者作为第一作者获得了最佳论文。这也是中国研究团队历史上第一次在这次国际顶级计算机视觉会议上获得 best paper。

UniAD提出了地平线,Unified Autonomous Driving 这么大的模型。该模型首次将检测、跟踪、构图、轨迹预测、占用格栅预测和规划融为一体。 Transformer 在端到端网络框架下,根据感知预测决策过程进行深度整合。
它实现了整个自动驾驶算法和性能的全面改进。与之前的神经网络相比,它更安全、更可控、更可解释。通过端到端的大模型, Transformer 大模型和 BEV 组合使用可以更好地关联和解释道路元素。
例如,在左转过程中,左转路线与左转过去几条车道之间的关系将相应相关,使整个规划过程能够更好地理解和相关道路元素,并为重感知轻地图提供技术基础,以支持技术方向的发展。
在智能芯片上介绍地平线的最新发展。今年 4 月上海车展,地平线发布的最新一代 BPU 纳什架构取得了许多核心技术的创新和突破。它主要与存储计算和数据总线的带宽直接相关,以进一步改进整个系统 BPU 处理效率和速度。
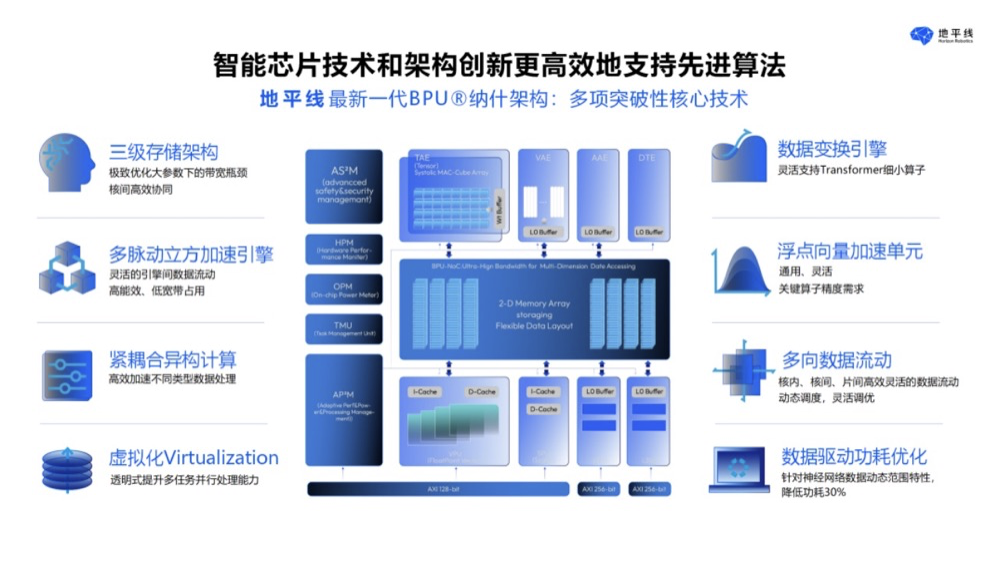
关于纳什架构,我简单分享几个突破性的核心技术。
首先,我们首次引入了浮点向量加速单元,可编程,更好地支持算法,使用户能够开发更细的粒度。
二是虚拟化,物理化 BPU 并在应用过程中显示多个虚拟核,使多个任务的执行完全透明。对于终端应用程序和开发者来说,处理复杂场景非常有效。
三是计算微架构,深入了解计算过程中的数据分布特征,根据这些分布特征设计计算微架构,降低计算过程中的动态功耗 30% 以上。

此外,我们还介绍了编译器的优化。编译器优化实际上是将软件和硬件连接起来的一个非常重要的部分,使整个芯片能够充分发挥其优势。
基于Graph的高效执行引擎和并行调度。基于Graph的深度优化和Graph的优化,最终实现了10X的编译速度, 模型推理性能提升超过20%
2021 年 7 月征5首次发布时,处理帧数为 1283 帧/秒。在硬件完全不变的情况下,通过编译器的优化,去年一年后 7 月份达到了 1531 帧/秒,整体性能提升20%。通过编译器进一步优化今年的最新结果,每秒都可以处理 1718 帧。

我想强调的是,在硬件不变的情况下,只有优化编译器才能大大提高芯片的性能和可用的真实计算能力。
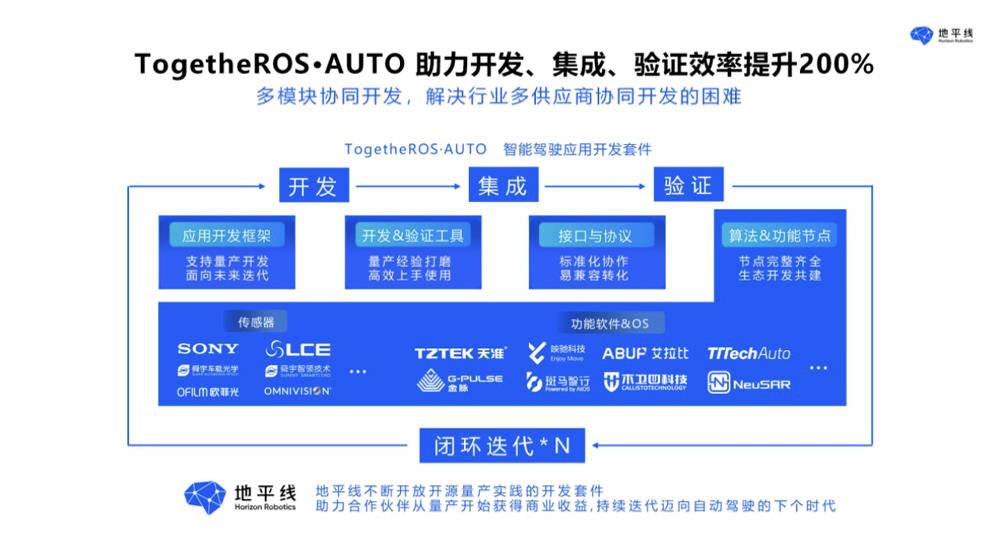
为了提高自动驾驶性能和用户体验,地平线进一步提高了产品开发效率,降低了开发成本,推出了智能驾驶应用开发套件,TogetheROS·AUTO。这是一套集开发、集成和验证三位一体的开发套件。
TogetheROS·AUTO包括支持大规模生产的应用开发框架、开放验证工具、接口和协议、算法和功能节点、多模块协调开发,解决行业多供应商协调开发的困难,帮助合作伙伴提高效率,降低成本。此外,地平线还推出了自己的云开发平台。通过这些方式,地平线开辟了整个产业链的生态合作。
到目前为止,已经有了地平线 50 余款合作车型量产,征程芯片出货量已达到 300 万片。目前,我们与100多个合作伙伴一起支持 20 多家主机厂,定点车型120多款。

特别感谢长安地平线芯片批量生产零的突破。长安UNI-T是第一个吃螃蟹的人,当时用的是征程2芯片。征程3、旅程5的首发是理想的汽车。新上市的比亚迪腾势N7 它还配备了旅程3。通过这些客户,地平线逐渐得到了业界的认可。特别感谢原始设备制造商的认可和我们的合作伙伴。通过合作,我们不断支持更多的车型。
在大家的共同努力下,我们看到自动驾驶正在朝着良好的方向发展。在这里,我们也期待着与我们的合作伙伴和原始设备制造商一起进一步促进自动驾驶的发展。
这是我的报告,谢谢大家。
(注:本文根据现场速记整理,未经演讲者审核)
原创文章,作者:盖世直播,如若转载,请注明出处:https://www.car-metaverse.com/202307/1516102803.html
