
作者 | 马波
编辑 | 德新


华为 ADS 2.0 登场
虽然上海车展尚未正式开幕,但今天的华为通过一系列新产品的发布预热了今年的汽车盛会。
就在今天上午,华为BU正式发布了一系列新产品,并升级了一些现有产品。内容多,升级范围大,使用「牙膏踩爆」毫不夸张地描述它。
华为在一个小时内阐述了BU五大解决方案 全面升级 ,华为ADS分别推出 2.0、鸿蒙OS 3.0、全新的HUAWEI SOUND 、智能车载光、智能汽车数字平台等一系列智能汽车解决方案。
其中,华为ADS是用户最期待的 2.0。
ADS 2.0:重点是无图也可以使用
余承东在3月份的华为春季新闻发布会上留下了悬念。当时,他宣布M5将推出高级智能驾驶模式,车辆也可以带来非常好的智能驾驶体验,而不依赖高精度地图。
今日谜底终于揭晓了。
根据今天的新闻发布会内容,华为ADS 2.0是在1.0的基础上增加GOD算法的软件栈平台。什么是GOD网络,我们先按下不表。
让我们先来看看华为的给予 ADS 2.0 四个标签是什么?
余承东说,华为 ADS 2.0 有四个特点,分别是:
领先一代的功能安全
高速公路更放心,城市更舒适
有图无图都可以打开
可见可泊的智能泊车系统
让我们来看看华为是如何定义这四个标签的。

第一代是功能安全。
在这里,华为定义的代际包括主动和被动安全。第一代是安全气囊和安全带;第二代是主动安全功能,包括毫米波、视觉和激光雷达检测。余承东认为,华为 ADS 2.0 GOD网络在安全性方面已经进入第三代,即在第二代的基础上增加。
GOD网络是华为最初的名词,其完整名称是 General Obstacle Detection(通用障碍物检测) PPT 我们还可以看到下面的注释,这是一个占据格栅网络,集成在视觉和激光之前。
这个名词熟悉多了吗?
我们都知道特斯拉 Autopilot 是业内第一个采用 BEV 感知架构的系统针对360°时序信息融合了感知。BEV 让 Autopilot 从上帝的角度来看,但当系统遇到异形障碍时,系统仍然需要具备出色的应对能力。
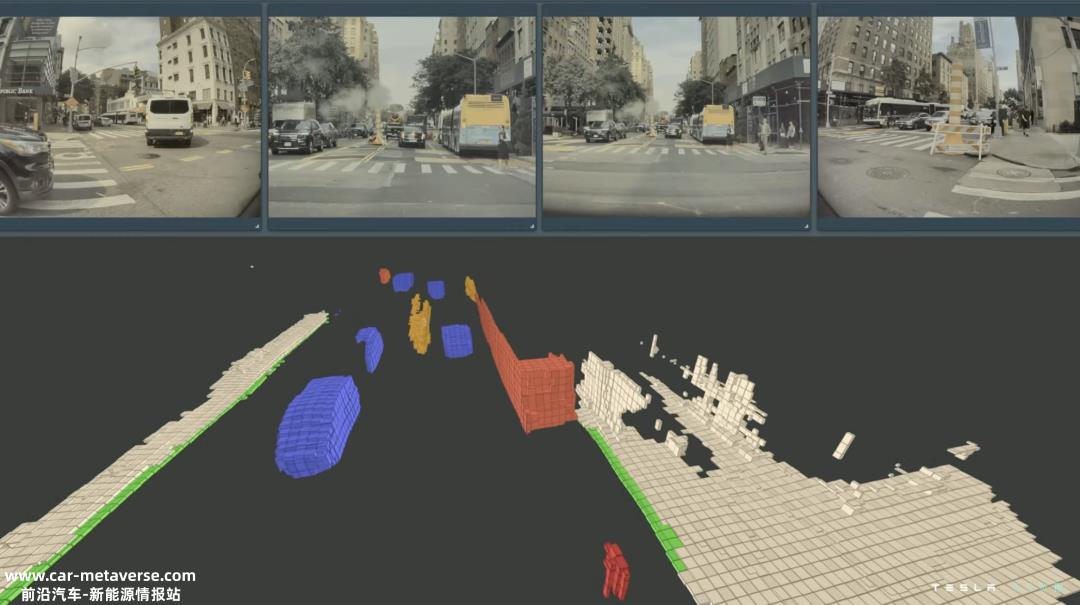
所以去年特斯拉 AI DAY 上,其研发总监 Ashock 着重分享了 Occupancy Network 占据网络的本质是将三维空间划分为体素空间。通过 0/1 赋值分类并标记空间中的物体。在这张图中,特斯拉将静态物体赋予红色,动态障碍物赋予蓝色属性,是一种典型的环境重构。
特斯拉利用 Occupancy Network准确构建了车辆空间最喜欢的特征空间状态。除了道路设施中的交通参与者外,特斯拉还可以输出道路的可行驶区域。
简单来说,过去的视觉感知会对道路上可能出现的物体进行大量的训练,让系统「认识」它,但随着环境变得复杂,外星障碍物无法耗尽。因此,占据网络找到一种新的方法,系统不需要知道它,只需要知道当前的空间不能驾驶。
余承东在今天的新闻发布会上也说了类似的话:「机器需要不断的训练来了解异形障碍,即使人眼不知道,也知道这不是路。」
为了自证「遥遥领先」,华为还进行了专项测试 。

在「前方故障车辆」在紧急制动测试中,ADS 2.0 在时速高达 80 km/h 它还可以识别并稳定制动。而国外的某个 T 品牌在 40 km/h 在时速下,我撞上了假人 假车组成的异形障碍物。
即使用目标较小的纸箱代替华为, ADS 2.0 也能够在 80 km/h 以时速识别和制停。
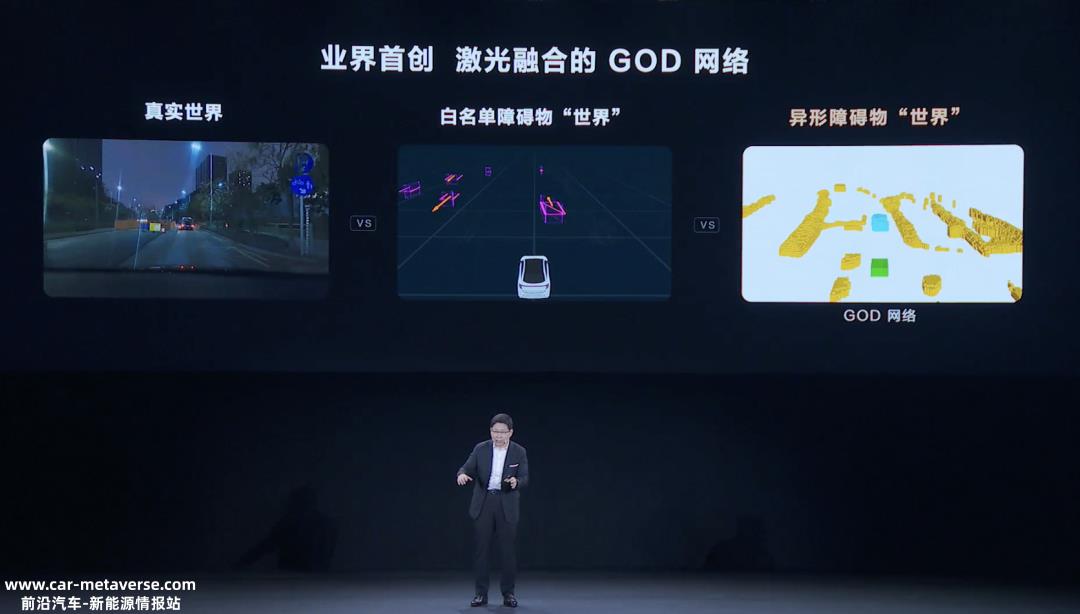
华为之所以将GOD定调为「业内首创」,主要原因是华为 ADS 采用多传感器集成方案,即激光雷达、视觉同时输入,而特斯拉则是纯视觉输入。
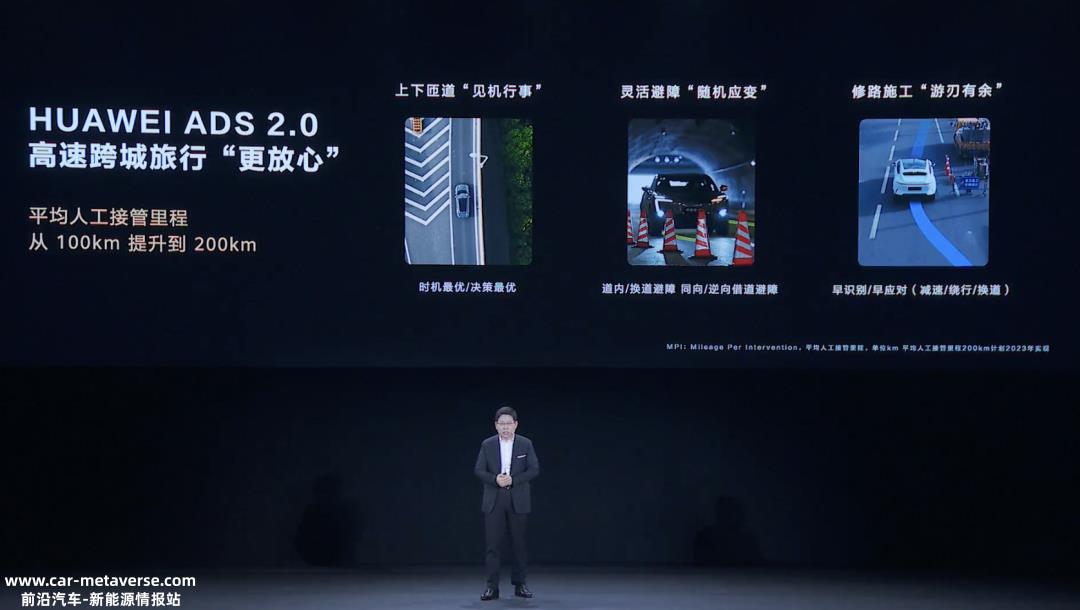
第二个标签「高速公路更放心,城市更舒适」更多的是在体验层面。余承东称华为为 ADS 2.0 将高速跨城下 NCA 接管次数,从过去开始 100 km 1 次,提升到 200 km 1 次。
巧合的是,在下午的小鹏汽车分享会上,何小鹏提出:2023 年内高速场景接管次数小于每千公里 1 次。
作为中国领先的玩家,华为和小鹏都致力于尽可能少地接管场景复杂性较低的高速场景,努力使高速接管更接近 0。

与此同时,余承东也表示,华为 ADS 2.0 将覆盖 90% 上述城市场景,涵盖各类路口、人车混行场景、环岛等。
第三个重要变化是无图下的能力。华为 ADS 2.0 减少对高精度地图的依赖,更加注重自行车的感知能力。
在ADS 1.0 时代,华为采用的是 BEV 模型,ADS 2.0 加入道路拓扑推理网络,即输入电子导航信息、动态交通流、静态占用信息,推理道路结构。
余承东再次强调为什么要抛弃高精度地图。
首先,价格很贵,只有上海 9000 华为花了一两年时间才完成公里道路,全国有几百万公里道路。
第二点是更新缓慢。高精度地图受安全监督控制,几个月才能更新一次,根本无法满足智能驾驶的迭代需求。
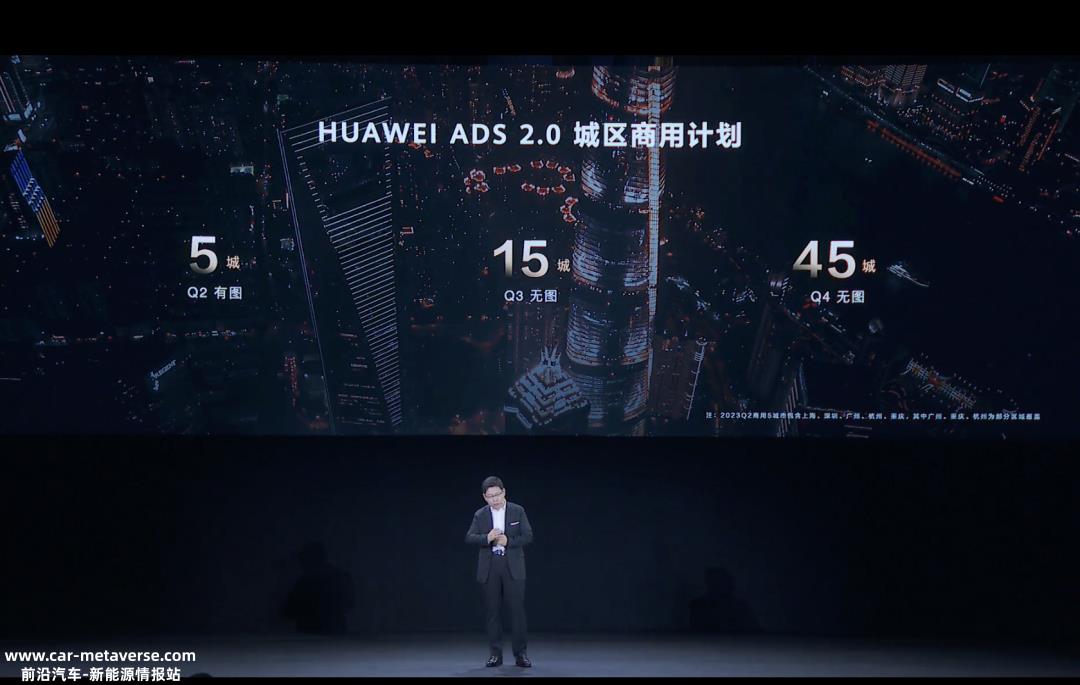
在商业着陆规划方面,华为计划在今年的Q2实现NCA着陆(依赖高精度地图);今年Q3实现了15个城市的落地(无图);到了Q4,泛化到45个城市。
第四点是停车。

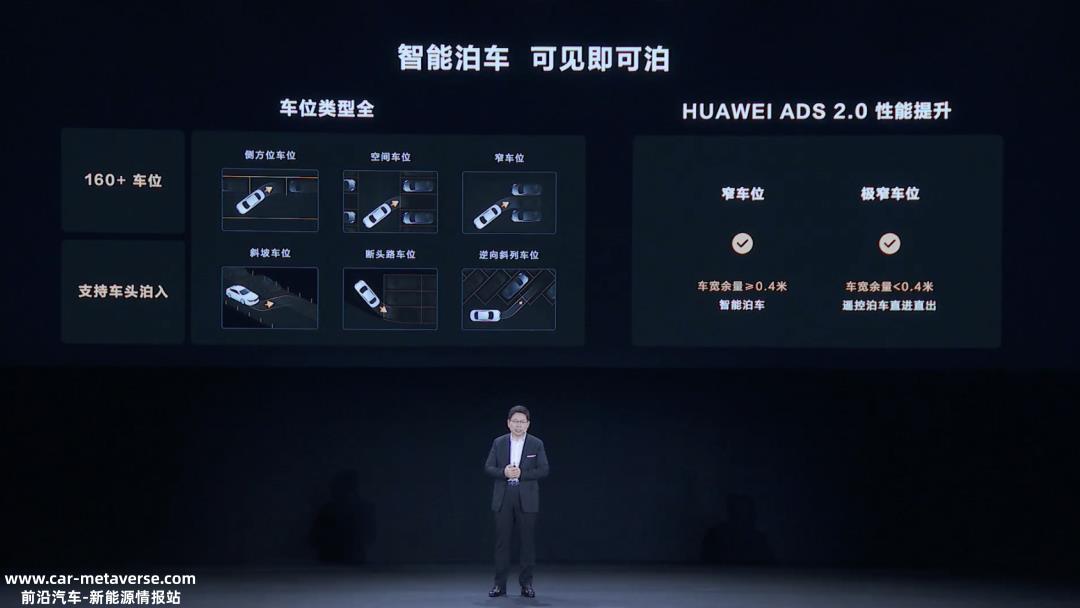
在 ADS 1.0 在此期间,其停车能力已成为行业的顶尖水平。而且 2.0 升级主要体现在两点。
一是加强了系统搜索能力,ADS 2.0 下面,系统可以识别 360° 停车位;同时,会有更多类型的停车位可以泊入,甚至支持前部泊入。
第二,ADS 2.0 将在年底实现 机械停车位停车 。机械停车位最大的困难在于停车位不仅较窄,而且两侧金属路肩较低,对感知精度要求较高。
代客泊车的功能一直处于不温不火的状态。但华为也有布局,华为 ADS 2.0 代客泊车将跨越地面和地下停车场,当目标停车位被占用时,他们也可以独立漫游,寻找新的停车位。


最后,余承东宣布,华为 ADS 2.0 将会在问界 M5 首次推出高级智能驾驶版。
同时,阿维塔11系和极狐阿尔法S HI也会搭载,除此之外还有十几款未官宣车型,将陆续上线 ADS 2.0。
余承东在合作模式上强调了两点。首先,华为没有终止与极狐的合作,双方的合作模式已经通过了 HI 模式升级为智能选择模式。与此同时,余承东重申了华为不制造汽车的策略,帮助汽车公司制造好汽车。
为什么我们期待华为? ADS 2.0?
最后,让我们谈谈为什么我们期待华为 ADS 2.0。
首先,华为的战略是帮助汽车公司制造好汽车。在智能浪潮下,头部新力量选择自主研发,但总有汽车公司需要外部力量。即使「灵魂」不在自己手中,但联合强大的供应商,打造体验过硬的产品,也能形成竞争力。
阿维塔和极狐都是华为 ADS 战略合作伙伴,所以智能驾驶的表现是平等的,但这两款车型的定位和个性完全不同,差异化也可以通过其他特点得到反映。
第二点是体验。华为 ADS 1.0 尹然的表现是行业的领先水平,但对高精度地图的过度依赖严重影响了场景的泛化,使得高级智能驾驶成为少数人的新鲜产品,难以推广到中小城市。泛化会影响功能的商业着陆,这是一个不利于行业发展的循环,所以我们期待着新软件堆栈 ADS 2.0。
还有一点,小鹏走在智能驾驶研发和项目落地的前列,XNet 在无图场景中提升用户的目标也是 NGP 使用体验。XNGP这张牌打出来,行业需要有人能跟上,华为是目前智能驾驶领域最有能力爱上小鹏的对手。
作者:马波,36氪经授权发布。
原创文章,作者:XEV研究所,如若转载,请注明出处:https://www.car-metaverse.com/202304/171871521.html
