
「自动驾驶核心相关技术」激光雷达发展之殇
真的需要这么“卷”吗?要说激光雷达的“堆料”有多“卷”,看看机甲龙就知道了。
真的需要这样的卷吗?
要说激光雷达的堆料有多卷,看看机甲龙。


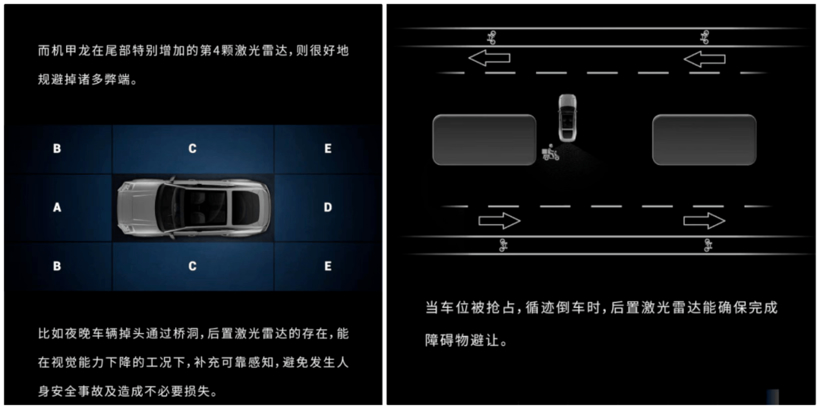
在成都车展上,机甲龙的量产版出现了。除了价格,我们看到的是机甲龙屁股中间显眼的激光雷达。
去年沙龙汽车以“4颗以下,请别说话”向业内宣告至少搭载4颗激光雷达才有资格“上桌说话”,如今,更让很多人想不到的是,激光雷达为什么要装到车屁股上?
沙龙官方网站的答案是避免许多缺点,当然,主要是夜间和倒车场景。
然而,在过犹不如的时刻,沙龙的做法确实值得商榷。有必要这样浪费吗?
01
合理性25%,修90000
本文不做纯技术解读,尽量让读者明白真相。
首先,一些激光雷达从业者认为,安装在车尾的激光雷达的合理性百分比为25%。
虽说根据官方表述后面的激光雷达主要为了倒车等场景,但倒车速度慢,与安全的强相关性较弱,一般的摄像头和超声波雷达也够了。而且,现在的车基本都装了360°倒车图像,激光雷达其实很难物尽其用。
正常情况下,激光雷达对前侧的感知要求更高。这涉及到激光雷达的成本仍然很高。
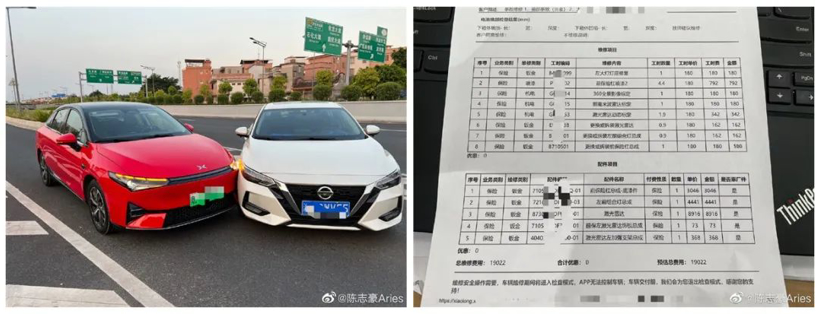
八月初,汽车博主@陈志豪Aries 小鹏小鹏P5激光雷达更换费用,价目表显示小鹏刮伤事故后P单个激光雷达(左前)的维护价格为8916元,加上相应的更换和工作时间,总成本将超过9000元。即使小鹏汽车的成本价格,事实上,单个激光雷达也必须超过4500元。
因此,正如前面提到的机甲龙一样,由于安装位置的特殊性,激光雷达划伤和碰撞的概率远高于车顶的安装方法。一旦发生事故,维护成本也相当高。
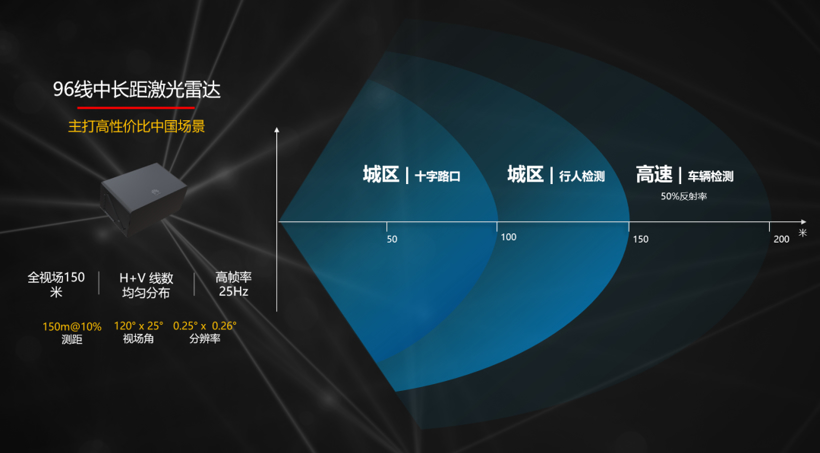
尽管华为曾声称96线激光雷达的成本在200美元以内,但无论是转镜式还是转镜式,MEMS从目前激光器、探测器、驱动电路等成本来看,微振镜技术方案短期内难以实现。
在过去的一年里,激光雷达在汽车圈非常流行。至少有小鹏声称世界上第一辆配备激光雷达的量产车P五、极狐阿尔法S,但是雷达的数量还没有达到沙龙的标准。即便如此,激光雷达的上车成本短期内也很难降低。
对于激光雷达数量的军备竞赛,一些汽车公司反对激光雷达数量的加法。例如,理想汽车创始人李翔曾抱怨过这一点。他认为激光雷达的两个功能可能不值得一个,盲目堆积的数量毫无意义。
为什么?在现有的车况下,单个激光雷达带来的数据量是巨大的,更不用说两个了?
相关工程师进行了实验。他们在数据采集车上安装了1128线和216线激光雷达,包括4个摄像头、1毫米波雷达、1个惯性导航和2个GPU,即使是千兆交换机也很难驱动这些传感器带来的数据量。
此外,两个或一个激光雷达都在前面,不同于一个安装,软件需要做的集成算法,比前者复杂得多。此外,这些消费者看不见的软件研发成本最终将反映在汽车价格上。
此外,激光雷达的汽车等级要求仍然很高。目前,激光雷达在行业可靠性方面的表现基本上是上车容易维护。早期数据很好,但基本上半年或一年后,各种数据开始大大降低。
因此,这对激光雷达企业的机电能力是一个很大的考验。激光雷达的可靠性、各种抗干扰性包括最重要的抗震性能、霜冻、雾、冷凝、薄冰覆盖场景、激光雷达是否具有自清洗、加热等功能等。
在这方面,激光雷达要走平民路线还有很长的路要走。
02
激光雷达和纯视觉路线
事实上,说到自动驾驶,一个不可避免的话题是选择激光雷达还是摄像头?还是集成路线?

毕竟,自动驾驶是通过感知、决策和执行三个核心环节,逐步将汽车的驾驶能力和驾驶责任从人转移到汽车。在感知环节中使用什么仍然存在争议。
特斯拉是纯视觉路线最极端的例子。Mobileye的SuperVision,百度的Apollo lite还选择了纯视觉方案的技术路线。为什么目前只有特斯拉等少数人采用纯视觉方案?
在这方面,我们不得不佩服马斯克从第一原则中考虑问题。一方面,纯视觉路线更复杂,研发投资更高,但逻辑推导未来是不可避免的结果;另一方面,纯视觉不仅仅是投资,需要积累足够的数据和场景,不断训练和改进筛选优秀可靠AI通过不断的算法迭代实现模型。
当然,也有反对意见。例如,一些业内人士认为视觉技术本身也有一定的技术缺陷,如跨层停车,特斯拉没有这个功能,实现这个功能需要激光雷达,因为跨层停车场景是静态障碍,地形复杂,需要地形建模,建模必须是激光雷达方案更好。
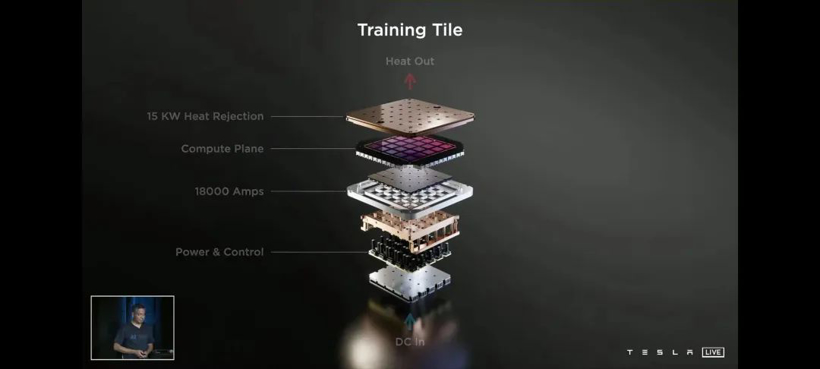
甚至开发了马斯克DOJO做这件事,就是打持久战,不能一蹴而就。然而,市场机会并不等人。每个人都想迅速进入智能驾驶市场,占据一席之地。最现实的解决办法是找到一个可以尽快取得成果的解决方案。因此,汽车公司优先考虑激光雷达方案是可以理解的。
然而,任何事物的发展都应该符合客观规律,激光雷达的问题之一是系统的计算能力是否可以驱动。激光雷达的硬件部分只是最基本的部分。重要的是软件集成算法能否顺利运行,智能驾驶平台能否驱动。
激光雷达方案并不像有些人想象的那么有用。与纯视觉路线的真实图像相比,其特点是数据量大,但信息量小。
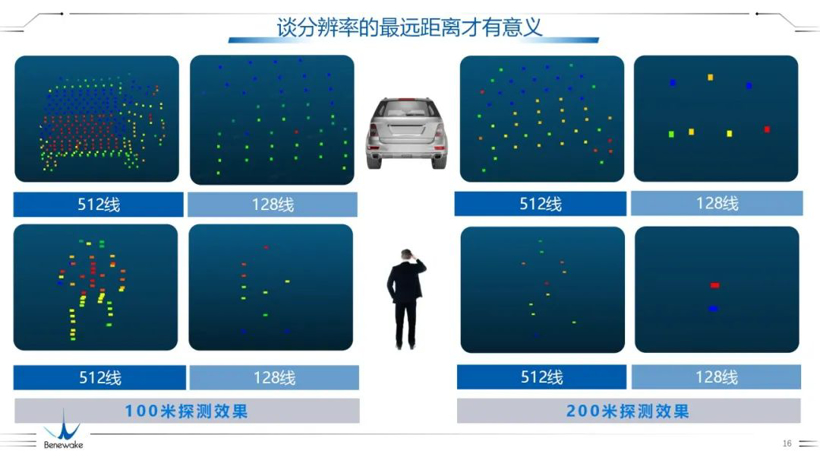
在第20届中国汽车供应链大会上,我们只需要看看北醒CEO李远博士分享了512线和128线激光雷达100~可以理解200米探测效果对比图。
此外,虽然激光雷达也通过反射生成图像,生成毛胚环境地图,即点云图或3D环境图。但这张激光雷达生成的图的精度取决于激光的线数。
比如我们说华为开发的激光雷达是96线或者128线,就是这个意思。
激光雷达需要收集大量的数据,这取决于周围的数据由于数据量过大,环境的复杂性必须有额外的计算能力支持,需要更高的成本和计算能力处理器,但这并没有带来额外的性能和功能改进。
就像有人问的,为什么有些车企愿意选择并大力传播激光雷达?
一位知乎博主鹦鹉怪兽说:因为对厂家来说,激光雷达方案实现得比较快,算法比纯视觉简单,研发投资相对较少。关键是开发周期短,只需在车上安装激光雷达和性能良好的处理器,这些都是消费者自己购买的,成本是消费者的。

对于汽车公司来说,这也降低了研发周期和成本。另一个考虑是,汽车公司可以使用这些装有激光雷达的大规模生产汽车作为向纯视觉方案的过渡手段,积累数据,改进算法,为未来实现纯视觉感知的能力做准备。
因此,激光雷达堆料之争纷扰,总觉得传播需求大于实际需求,我们来看看。
毕竟,高级自动驾驶离真正的大规模生产应用太远了。消费者自然会知道如何选择本质上的差异。
原创文章,作者:来源:汽车公社 王小西,如若转载,请注明出处:https://www.car-metaverse.com/202209/05104925.html
