
作者 | 爱LiDAR的小飞哥
编辑 | 王博


在上一期中,我们讨论了补盲激光雷达上车的重要前提——安全。
本期我们来谈谈补盲激光雷达在满足功能安全、网络安全等领域的关键设计要求后,如何更接近工程表达「易用」。
在之前的文章中,小飞哥曾经提到,与长途主雷达相比,补盲雷达的使用场景非常不同。补盲激光雷达主要覆盖车身附近的区域,因此不可避免地会有很多「近身搏击」包括:
1. 路面元素多样化:围栏、各种锥桶和栏杆、宠物、儿童、异形障碍物;
2. 复杂的反射环境:各种反射强度的障碍物,更复杂的多径反射;
3. 物理接触:与车身更强的耦合,意想不到的手,飞溅的水花,飘忽不定的尾气等;
4. 传感器数量更多:这款车会有更多的同类传感器,空间中会有更多的同类传感器或异类传感器
这无疑对补盲激光雷达的成像质量提出了更精细、更准确的要求。毕竟,自动驾驶系统需要依靠其点云输出来支持困难的决策、规划和控制动作。此外,由于距离较短,允许补盲激光雷达输出正确点云的时间限制非常小。
由此可见,推出补盲激光雷达很容易,但要做到「 易用」挑战还是挺大的。
补盲激光雷达除了在结构和硬件设计上下功夫外,还需要为补盲场景建立完善的软件功能,才能将工程意义上的易用补盲激光雷达交付给汽车企业。
三年前,一径科技推出了第一款补盲激光雷达产品,在无数自动驾驶实践中积累了大量的特殊补盲场景和工程实践经验,并将其转化为实用的激光雷达功能。
本期,我们来谈谈几个典型的功能。
去粘连算法:切断异常丝线
激光雷达点云粘连,又称拖点
原因其实很简单。由于激光雷达的发射激光束有发散角,这意味着随着激光束的传播,其发射激光的光斑尺寸会随着距离而增加。当激光束同时接近前后两个物体边界时,前后两个反射回波会同时产生,如下图所示。

然而,由于两个物体相距较近,前后两个回波将在时间维度上叠加在一起,形成一个新的回波。从距离的角度来看,新的回波远离物体,远离物体,从而产生两个物体边缘之间的虚假点,导致前后物体边缘之间的漂浮点云,即点云粘附。
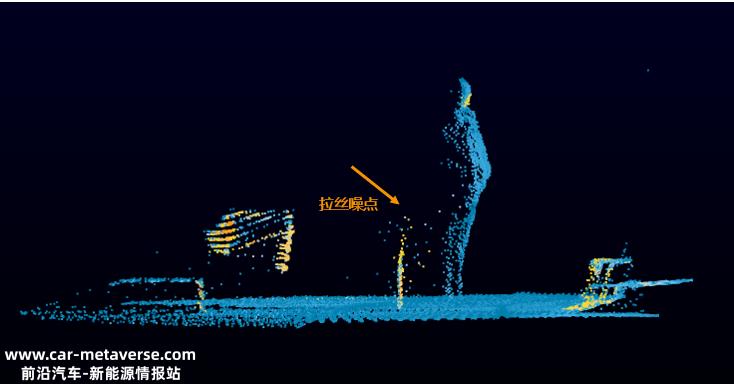
点云粘连对感知的最大影响之一是误识别。
如下图所示,汽车穿过非机动车道,由于粘连,道路中间的围栏和地面之间会产生线性粘连噪声。

这些噪音使围栏和地面似乎连接在一起,变成一团点云。感知很可能会将这个大云误解为一辆倒在地上的蓄电池车;汽车在驾驶过程中有一定的速度,驾驶过程中点云角度的变化会使粘附点有一定的相对速度。在如此近的距离内,有一辆电池车以一定的速度倒在地上,这无疑会导致自动驾驶车辆紧急制动或缓慢行驶。
此外,如果点云粘附过于严重,系统将减少物理世界原本开放的无障碍空间范围,影响低速自动驾驶决策和狭窄物理空间的车辆通过性。
如何避免点云粘连?
去除粘连点云很有挑战性,既不能误删,也不能漏删,同时还要保证多场景的适用性。
针对近距离点云粘附的现象,一种可行的方案是将复杂路况和狭窄空间下粘附噪声的影响降低到自动驾驶系统可接受的水平。

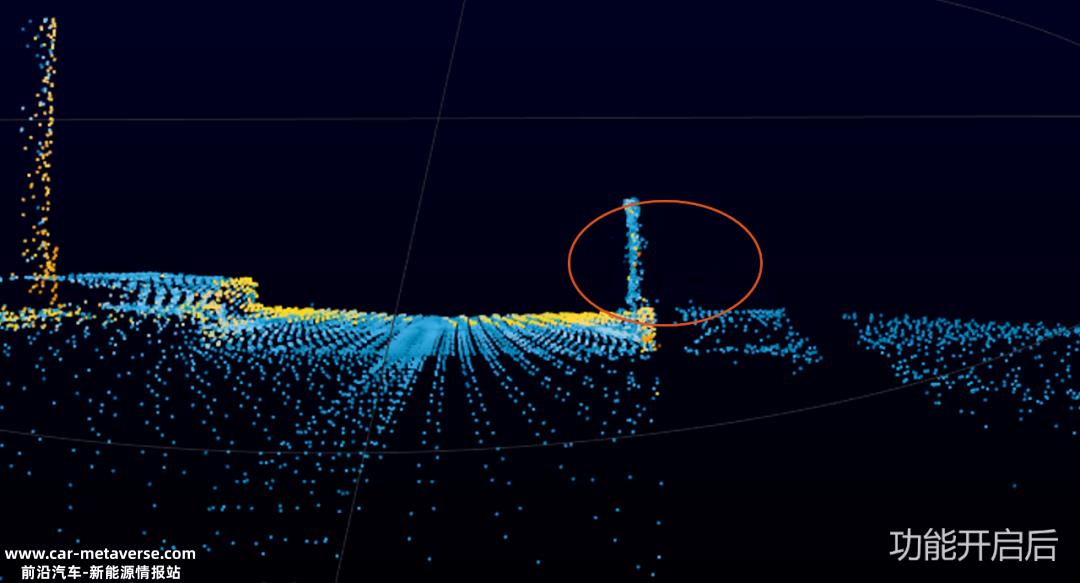
特定点遮挡:异常点云精确处理
在使用盲雷达时,不可避免地会出现扫描视野和车身干扰。由于车身形状和表面材料的多样性,这种干扰现象将非常复杂,甚至会产生一些奇怪的云图像。
其中一个奇怪的形象是靠近车身的虚假浮点。
具体来说,激光雷达的一个大角度的激光束部分击中了前面,另一部分击中了前面的地面。根据上述点云粘附的原理,前面会产生虚假的浮点。
在一定程度上,类似的点会在车身前形成障碍物。


另一种点云怪像是车身上多余的噪音。
由于补盲激光雷达的出射光和车身的干扰发生在靠近激光雷达的区域,一些能量会直接返回探测器,形成车身上的点。
此外,由于大多数车身的油漆反射率高,镜面效果好。因此,光滑车身上的一些出射激光会反射到空间中的障碍物中,从而形成不必要的噪声。
上述种种「近车身肉搏」自动驾驶系统不希望看到点云怪像。因此,有必要以工程和批量的方式处理这些异常点云,以确保车辆出厂时,补盲激光雷达与车身之间没有「瓜葛」。
针对这种异常点云,可以开发特定点删除套件,通过处理固件底部的特定角度点,完成异常点的过滤,解决车身干扰引起的点云怪物。
要解决的关键难点是对车身不同形状的适应性,以及出厂批量集成的效率。

多雷达安装防错:提高集成效率
我们讨论了补盲激光雷达在感知过程中的两个特殊功能设计,但对于汽车公司来说,激光雷达的使命从交付的那一刻起就已经开始了。在这个经常被忽视的阶段,对补盲激光雷达有许多特殊的功能要求。
例如,如果一个模型选择使用盲雷达,它很可能同时使用多个盲雷达来确保零盲区,然后需要考虑如何方便地安装多雷达。
不仅要防错,还要方便。先看激光雷达安装如何防错。
在一辆车上使用多种类似的补盲雷达时,有两种常见的防错方案:
1. 根据安装方向,根据安装方向分为几种不同的配置型号,安装时根据雷达型号对应安装。
2. 雷达下线不做特殊配置,按默认配置统一装配,在整车集成的某一步进行特殊配置。
第一种方案的优点是简单直接。缺点是客户和供应商的材料管理麻烦,备件数量会随型号而增加;第二种方案的优点是材料管理简单,缺点是需要特殊的配置方案。
因此,需要一套多雷达方便防错,真正提高补盲激光雷达在整车集成过程中的效率,需要一套能够兼顾两种方案优缺点的智能方案。
端到端完整方案:「易用」的基础
对于盲激光雷达供应商来说,盲激光雷达的易用性测试是交付一套完整的应用解决方案,不仅包括硬件,还包括软件功能,甚至是集成和应用过程的各个方面。
除上述分析外,还包括:
· 人眼安全保护机制安全保护机制?
· 如何更好地实现抗串扰,应对越来越常见的多传感器场景?
· 如何设计网络和同步功能,以更好地实现多传感器之间的协调?
· 为了减少线束,如何设计其电源和信号线?
· 如何更好地实现超短距离探测,满足零盲区探测距离的要求?
一切都不一样。这些都是易用补盲激光雷达应满足的性能要求。
在目前的激光雷达市场上,指标参数竞争一直在上演。然而,从汽车公司的角度来看,指标参数的成功并不是最终目标,为汽车公司带来价值的产品成功更有意义。这也是激光雷达的易用价值。
据悉,一径科技将于2023年举行CES发布新一代补盲激光雷达ML-30s+,不仅在成像效果上表现出色,还全面规划了车辆规则要素的软件功能OEM从角度出发,打造真正易用的补盲激光雷达产品。
原创文章,作者:XEV研究所,如若转载,请注明出处:https://www.car-metaverse.com/202212/271931591.html
