
自动驾驶的未来如你所愿?
2023年,国产车约15万元,已批量配备L2级辅助驾驶,部分车型有升级自动驾驶的潜力。
小鹏、理想等新能源汽车企业的一些车型已经增加了试点辅助驾驶功能,自动驾驶似乎离我们不远。
事实是,自动驾驶离我们还有很长的路要走。在国内自动驾驶芯片和技术研发公司地平线媒体交流会议上,地平线首席技术官黄昌、副总裁余一南与媒体教师就自动驾驶相关问题进行了激烈的讨论,每个人都有自己的观点,但在辩论中,自动驾驶的未来越来越清晰。
硬件计算能力达到上限,软件效率达到下限
2019年,NVIDIA发布了计算能力高达254TFLOPS的Orin智能驾驶芯片,其强大的计算能力迅速成为高端汽车的首选产品之一。2022年,NVIDIA发布了一款计算能力高达2000TFLOPS的新型智能驾驶芯片Thor。纵横GPU、人工智能等行业的NVIDIA,刚进入汽车领域,就让我们看到了它的实力。
相比之下,虽然其他芯片制造商也发布了许多智能芯片,但计算能力与NVIDIA之间存在很大差距。作为国内领先的智能汽车芯片企业,地平线发布之旅5只是128TFLOPS。
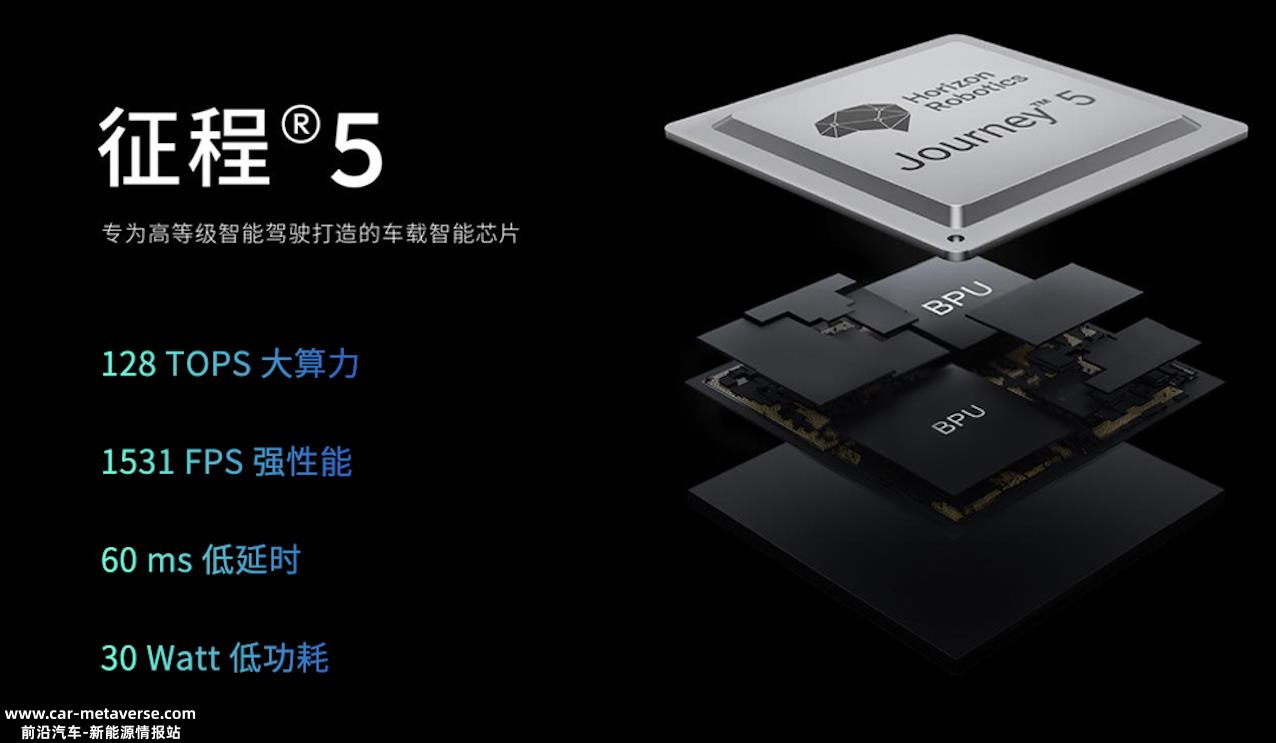
图源:地平线
智能驾驶芯片算力到底意味着什么,只算力论是否正确?
根据余一南和许多客人的评论,小雷认为计算能力是智能驾驶的上限,特别是在当今汽车功能丰富、芯片集成度越来越高的情况下,即使功能简单,智能驾驶体验一般,只要计算能力足够高,就有广阔的OTA空间。
当然,高计算能力也意味着更高的成本和更高的功耗。正如余一南所说,只有每个人都能负担得起自动驾驶,消费者才能普遍接受自动驾驶。就像当年几百块红米一样,几乎所有的功能机都瞬间被杀死了。在这方面,高端汽车可以使用高计算能力、高成本的智能汽车芯片,但低计算能力、低成本的芯片也是必不可少的。
如果计算能力不够高,就需要通过架构和软件优化来提高效率。余认为芯片计算能力是基础,但关键在于软件算法能发挥芯片的性能。余认为,评估智能驾驶芯片最准确的标准不是计算能力,而是每秒处理多少图片。只有128TFLOPS计算能力之旅5。架构和算法优化后,每秒可处理1531帧图片,功耗30W。
基于单次征程5,轻舟智航开发了高级辅助驾驶功能。轻舟智航方案采用一次征程5、11个摄像头,5个雷达,实现高速NOA和L2智能辅助驾驶,增加5个旅程和激光雷达,实现城市NOA。
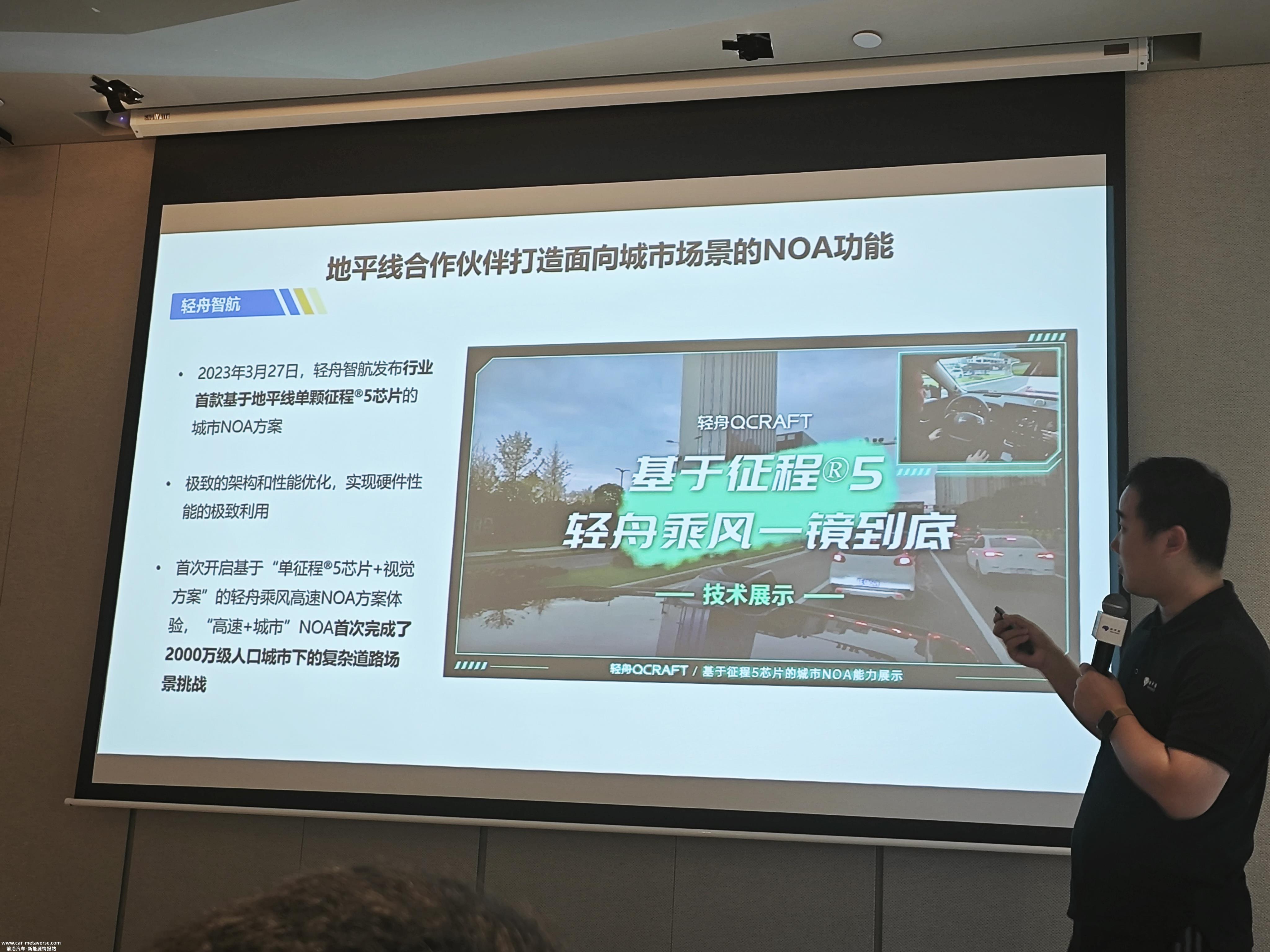

图源:雷科技摄制
不仅如此,小鹏P5只配备了30TFLOPS计算芯片,实现了城市试点辅助驾驶功能。结合高精度地图,部分城市路段可以完全由汽车和机器控制。可以看出,低计算能力仍然可以实现高级辅助驾驶,但在低计算能力的情况下,汽车需要使用更多的逻辑计算来干预汽车的驾驶,而当计算能力足够时,汽车可以使用更多的智能计算,充分根据传感器收集的数据进行智能判断。
余轶南认为,算力是一个很容易解决的方案,一次旅行5不够,那就两个,两个还不够,那就上四个。
城市试点辅助驾驶与自动驾驶非常接近,但通常以L2命名 、L2 、L2.9、L2.99等等,不敢称自己为L3。甚至有嘉宾对L3很兴奋,不认为L2是L3,甚至认为L3是一个错误的命题,L2 真正的自动驾驶还有很多差距。
L3不是自动驾驶的必然阶段吗?
SAE(美国汽车工程师协会)将智能驾驶分为六个级别:L0~L5,其中L3为条件级自动驾驶。汽车可以在大多数情况下自动驾驶,但要求司机保持注意力集中,以便在紧急情况下接管汽车。
问题是如何判断紧急情况,何时交给司机控制车辆,是否考虑司机是否有时间接管车辆,或者司机的处理方案是否比人工智能更可靠?最重要的是,如果真的发生了事故,谁应该负责?事故会发生吗?前一秒,汽车要求司机接管车辆,以便摆脱责任?
自动驾驶也需要司机集中注意力,这本身是不合理的,总是保持注意力,人们仍然会感到很累,也可能会因为不需要操作而感到困倦。也许,使用自动驾驶覆盖范围而不是自动驾驶水平是一个更合理的解决方案。
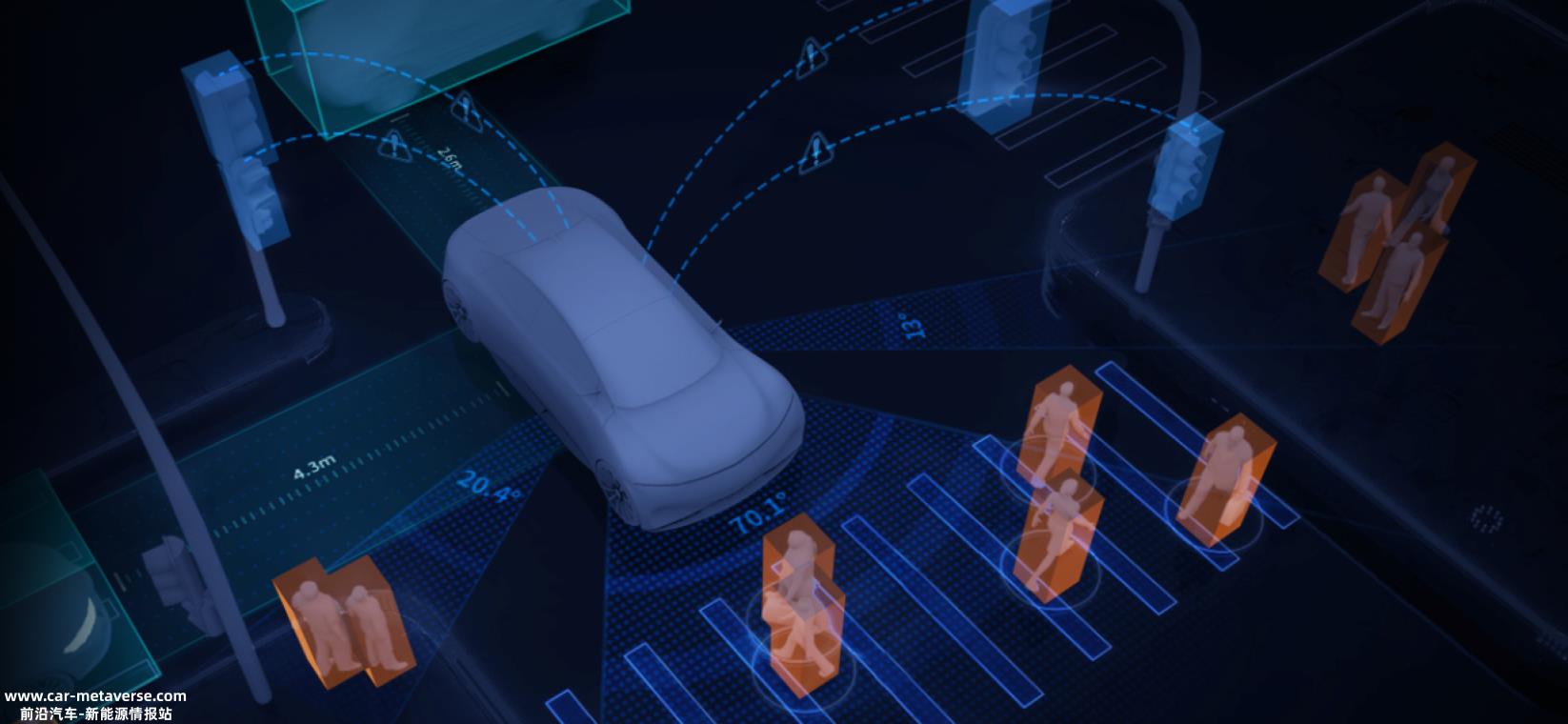
图源:地平线
例如,将城市、高速公路、农村道路、夜间模式等不同的驾驶场景划分为不同的驾驶场景,从容易到困难,慢慢实现自动驾驶的全场景覆盖,最终实现完全自动驾驶。一般来说,高速公路没有相反的车辆(除非有非法逆行),驾驶环境单一,汽车只需要与前车保持安全距离,实现自动驾驶相对简单,所以单旅程5可以很容易地实现高速NOA。
城市交通流量过大,路况复杂,车道需要频繁更换,难以实现自动驾驶。仅仅依靠毫米波雷达和摄像头,轻舟智航就实现了高速NOA,但城市NOA需要激光雷达。夜间视力模糊,自动驾驶难度飙升。没有激光雷达,安全性就无法保证。
在允许的驾驶场景中,用户可以打开自动驾驶并进入未覆盖的驾驶场景,这显然是一个更合理的解决方案。如果发生事故,责任划分也很方便。
我们能否接受自动驾驶的另一个问题
马斯克曾经说过,自动驾驶不应该由SAE设定,而应该考虑四个方面:安全性、舒适性、交通效率和覆盖范围。安全和舒适是基础。如果安全性不够,相关部门肯定不允许上路。如果舒适性不够,消费者可能不愿意购买。覆盖范围是最直观的体现,交通效率是汽车自动驾驶后乘客最关心的问题。
作为一名驾驶一年的新司机,肖磊知道遵守交通规则是驾驶安全的基础,但在某些情况下,仍然很难避免一些违规行为。例如,一旦送人上班,由于道路维护,需要逆行一段距离,汽车是否能智能地接受这样的“违规”。还有车道堵塞,需要塞到其他车道,汽车能否主动跨线堵塞。
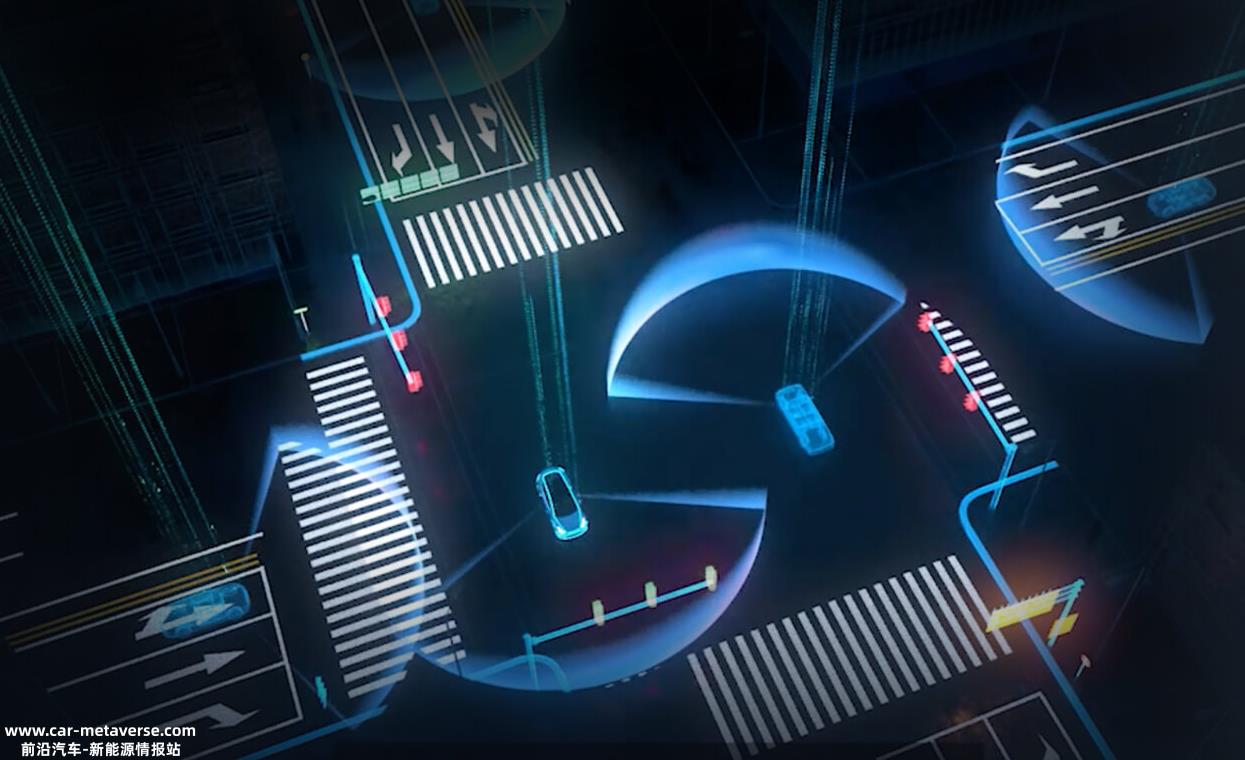
图源:地平线
最重要的是,小雷看了很多自动驾驶汽车的视频,遇到堵塞基本上会选择主动减速,虽然安全可以保证,但交通效率大大降低。如果有多辆车被堵塞,自动驾驶汽车会被堵塞吗?
自动驾驶全面普及后,汽车可以按规定安全驾驶。在此之前,自动驾驶汽车也可能需要一些合理的“违规”,以提高交通效率。
在地平线的媒体交流会议上,许多客人表达了他们的见解,让我们对自动驾驶有了更深入的了解。软硬结合,在确保安全的前提下提高效率,降低成本,是自动驾驶普及的关键。地平线的目标约为15万元,结合激光雷达的成本越来越低,自动驾驶领域的红米手机可能离我们不远。
封面图源:地平线
来源:雷科技
原创文章,作者:雷科技,如若转载,请注明出处:https://www.car-metaverse.com/202304/091767937.html
