
上个世纪90年代,激光雷达首次被应用于汽车测距。到现在30年过去,其已经成为汽车感知系统最重要的传感器之一。马斯克曾称,激光雷达“傻子才用”,但抛开价格层面的因素,特斯拉在标定测试数据时,也免不了要用激光雷达作为校准依据。
事实上,围绕激光雷达的争议从未停止过。面向L3及以上自动驾驶功能的实现,包括大众集团前CEO迪斯在内的人都认为,激光雷达是个必要条件。不过市场观点似乎难得达成了一致——L2+级将是未来很多年的主流形式。
那么,激光雷达是否还是现阶段高阶辅助驾驶的“Must Have”?
“近乎完美”的感知部件
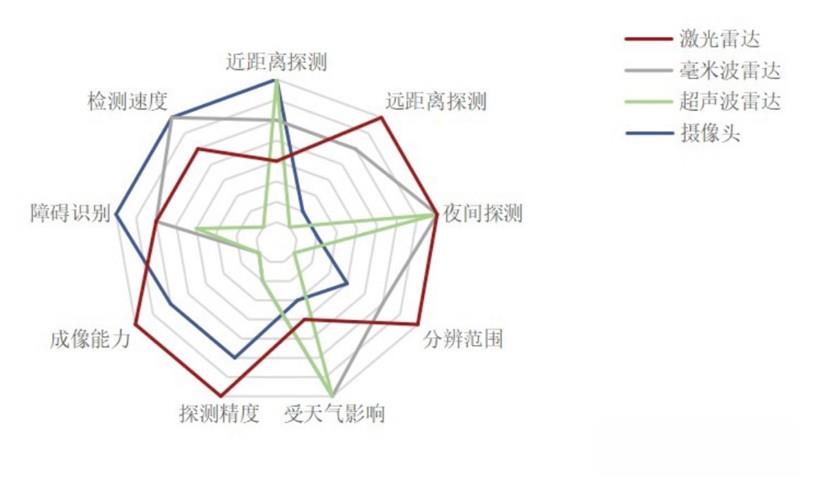
从工作原理讲,激光雷达是通过发射激光脉冲和反射脉冲的对比,生成目标物体的点云图,进而实现测距和成像的目的。相比摄像头,它测距可以更远、抗光源干扰的能力更强;相比毫米波雷达,它的角分辨率和精度更高,同时对目标物体的轮廓识别更加精准。
其主要缺点在于,受雨雪雾天气影响较大。不过,北醒CEO李远指出,如果激光雷达不受雨雪雾的影响,那它也就不会探测到细小物体。“干扰和发现往往共存,当你觉得没有干扰时,也就没有发现了。”而这类干扰可以通过算法、强信号输出等方式进行优化处理。

原创文章,作者:盖世汽车,如若转载,请注明出处:https://www.car-metaverse.com/202305/011078486.html
