
本文主要分享伺服驱动器简单介绍,其主要运作原理,相关的维修故障代码解释,调研2022年伺服驱动器相关的品牌公司以及其市场规模。
1、什么是伺候驱动器
伺服驱动器(servo drives)又称为“伺服控制器”、“伺服放大器”,是用来控制伺服电机*的一种控制器,其作用类似于变频器作用于普通交流马达,属于伺服系统的一部分,主要应用于高精度的定位系统。一般是通过位置、速度和力矩三种方式对伺服电机进行控制,实现高精度的传动系统定位,是传动技术的高端产品。
伺服驱动器主要的作用是控制伺服电机,搭配伺服电机使用,一般不会单独使用。
*伺服电机(servomotor)是指在伺服系统中控制机械元件运转的发动机,是一种补助马达间接变速装置。伺服电机可使控制速度,位置精度非常准确,可以将电压信号转化为转矩和转速以驱动控制对象。伺服电机转子转速受输入信号控制,并能快速反应,在自动控制系统中,用作执行元件,且具有机电时间常数小、线性度高、始动电压等特性,可把所收到的电信号转换成电动机轴上的角位移或角速度输出。
2、伺候驱动器工作原理简介
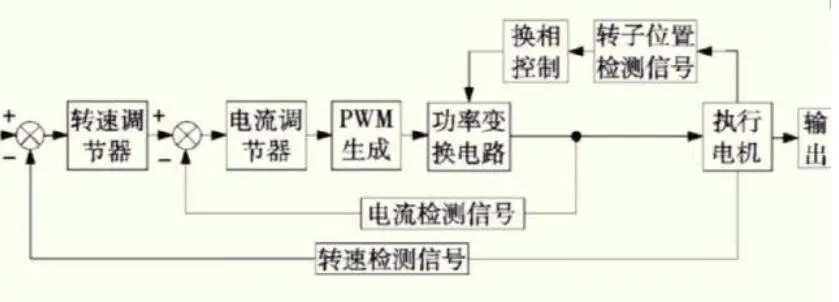
伺服驱动系统的控制对象是机床坐标轴的位移和速度,执行机构是伺服电机或步进 电动机;对输入指令信号进行控制和功率放大的部分 称为伺服放大器(亦称驱动器、伺服单元等),它是伺服驱动的核心。
驱动器的核心主控板,驱动器由继电器板传递控制信号和检测信号,完成上图的双闭环控制,包括转速调节和电流调节,实现执行电机的转速控制和换相控制。驱动器的驱动板从主控板接受信号驱动功率变换电路,实现执行电机的正常工作。

在伺服控制系统中,伺服驱动器相当于大脑,执行电机相当于手脚。而伺服驱动器在伺服控制系统中的作用就是调节电机的转速,因此也是一个自动调速系统。
伺服驱动器在控制信号的作用下驱动执行电机,因此驱动器是否能正常工作直接影响设备的整体性能。
伺服驱动器内部结构
伺服驱动器内部结构由电源电路、继电器板电路、主控板电路、驱动板电路及功率变换电路组成。电源电路作用,将外部输入的直流电转换为大小不同的直流电输出,为后续的继电器板、驱动板、功率变换电路提供直流电源。继电器板作用,提供直流电完成控制信号、检测信号传递。
- 电源电路:电源电路是指提供给用电设备电力供应的电源部分的电路设计,使用的电路形式和特点。既有交流电源也有直流电源。
- 电路板式继电器:电路板式继电器是一种迷你化电子控制器件,其中电路板 使电路迷你化、直观化,对于固定电路的批量生产和优化用电器布局起重要作用。
- 控制板:控制板也是一种电路板,其运用的范围虽不如电路板来的宽泛,但却比普通的电路板来的智能、自动化。简单的说,能起到控制作用的电路板,才可称为控制板。大到厂家的自动化生产设备,小到孩童用的玩具遥控汽车,内部都用到了控制板。
3.伺服驱动器相关维修故障代码
不同品牌的伺候驱动器维修代码不一样,本文主要搜集了三菱、安川、西门子、松下的一些主要伺候驱动器相关的故障代码以及维修提示。
3.1 三菱伺服电机驱动器故障代码
- AL.E6-表示伺服紧急停止。引起此故障的原因一般有两个,一个是控制回路24V电源没有接入,另一个是CN1口EMG和SG之间没有接通。
- AL.37-参数异常。内部参数乱,操作人员误设参数或者驱动器受外部干扰导致。一般参数恢复成出厂值即可解决。
- AL.16-编码器故障。内部参数乱或编码器线故障或电机编码器故障。参数恢复出厂值或者更换线缆或者更换电机编码器,若故障依旧,则驱动器底板损坏。
- AL.20-编码器故障。电机编码器故障或线缆断线、接头松动等导致。更换编码器线或伺服电机编码器。MR-J3系列发生此故障时,还有一种可能是驱动器CPU接地线烧断导致。
- AL.30-再生制动异常。若刚通电就出现报警,则驱动器内部制动回路元件损坏。若在运行过程中出现,可检查制动回路接线,必要时外配制动电阻。
- AL.50、AL.51-过载。检查输出U、V、W三相相序接线是否正确,伺服电机三相线圈烧坏或接地故障。监控伺服电机负载率是否长时间超过伺服响应参数设置过高,产生共振等原因。
- AL.E9-主回路断开。检查主回路电源是否接入,若正常则主模块检测回路故障,须更换驱动器或配件。
- AL.52-误差过大。电机编码器故障或驱动器输出模块回路元件损坏,通常油污较多的使用场合此故障较多。
3.2 安川伺候驱动器维修常见故障代码
- 11号报警,控制电源欠电压,控制电源逆变器上P。N之间电压低于规定值。驱动器内部电路有缺陷等原因。
- 12号报警,控制电源过电压,控制电源逆变器上P。N之间电压超过规定值,驱动器内部电路有缺陷等原因。
- 13号报警,主电源欠电压,发生瞬时断电,电源接通瞬间的冲击电流导致电压跌落,缺相或驱动器内部电路有缺陷等原因。
- 14号报警,过电流或接地错误,驱动器内部电路或IGBT或其他部件有缺陷,或电机电缆(U,V,W)短路或接地,或电机烧坏了。
- 21号报警。驱动器控制板电路有缺陷。 3.2.6:60号报警:驱动器控制板电路有缺陷。 3.2.7:不能正反转:驱动器控制回路有缺陷。
- 驱动器没显示:驱动器内部电路或IGBT或其他部件有缺陷。
- 99号报警:驱动器内部电路有缺陷。
- 显示EEEEEE,驱动器内部电路有缺陷。
3.3 西门子伺候驱动器维修常见故障代码
- F7453:位置实际值处理出错反应: OFF1 ;应答:立即 ;原因:位置实际值预处理时出错; 处理方式:检查编码器位置实际值预处理。
- F7459:不存在零脉冲反应: OFF1 ;应答:立即;原因:离开参考挡块后,此轴移动-段参考挡块和脉冲之间的最大允许行程( p2609),但未找到零脉冲;处理方式:检查编码器零脉冲。查参考挡块和零脉冲之间允许的最大行程(p2609)。使用外部的编码器零脉冲( 等效零脉冲)。
- F7490:运行时取消使能反应: OFF1;应答:立即;原因:采用标准设置时可能会由于取消使能信号而出现另外的故障。此驱动处于“接通禁止”状态(采用标准设置)。;处理方式:设置使能信号,或检查并消除首先出现的故障的原因(采用标准设置)。检查简单定位器使能的设置。
- F7491:到达负限位反应: OFF3;应答:立即;原因:已到达负向停止挡块。在运行方向为正时,运行到负向停止挡块,也就是说,停止挡块的连接错误;处理方式:在正方向离开负向停止挡块,轴返回到有效的运行范围。检查停止挡块的连接。
- F7492:到达正限位反应: OFF3;应答:立即;原因:已到达正向停止挡块。在运行方向为负时, 运行到正向停止挡块,也就是说,停止挡块的连接错误;处理方式:在负方向离开正向停止挡块,轴返回到有效的运行范围。检查停止挡块的连接。
- F7493:LR:溢出位置实际值的范围反应: OFF1 (OFF2,OFF3);应答:立即;原因:超出位置实际值范围当发生溢出时,“回 参考点”或“调整绝对测量系统的状态被重置。故障值的更多信息请参考参数手册;处理方式:若需要,减小运行范围或位置分辨率(p2506)。增加绝对位置实际值(p0419)的精确分辨率。注意故障值=3:参考参数手册。
- F7801:电机过流反应: OFF2;应答:立即;原因:超过了电机允许的限电流。有效电流限值设置太小。电流环设置不正确。停转扭矩修正因数太大,使电机制动。斜坡上升时间设置过小或负载过大。电机电缆短路或接地故障。电机电流与电机模块的电流不匹配。处理方式:减小停转扭矩修正因数。延长斜坡上升时间或者减小负载。检查电机和电机电缆的短路和接地故障。检查电机模块和电机的组合。
- F7802:整流单元或功率单元未就绪反应:OFF2;应答:立即;原因:由于以下原因,整流单元或驱动在内部接通指令后没有回馈就绪:监控时间太短。直流母线电压不存在。组件所属的整流单元或者驱动有故障。处理方式:确保直流母线电压供给。检查直流母线排。使能整流单元。更换组件所属的整流单元或者驱动。
3.4 松下伺服驱动器维修常见故障代码
- 11号报警,控制电源欠电压,控制电源逆变器上P、N之间电压低于规定值。驱动器内部电路有缺陷等原因;
- 12号报警,控制电源过电压,控制电源逆变器上P、N之间电压超过规定值,驱动器内部电路有缺陷等原因;
- 13号报警,主电源欠电压,发生瞬时断电,电源接通瞬间的冲击电流导致电压跌落,缺相或驱动器内部电路有缺陷等原因;
- 14号报警,过电流或接地错误,驱动器内部电路或IGBT或其他部件有缺陷,或电机电缆(U,V,W)短路或接地,或电机烧坏了;
- 21号报警。驱动器控制板电路有缺陷;
- 60号报警:驱动器控制板电路有缺陷;不能正反转:驱动器控制回路有缺陷;驱动器没显示:驱动器内部电路或IGBT或其他部件有缺陷;
- 99号报警:驱动器内部电路有缺陷;显示EEEEEE,驱动器内部电路有缺陷。
4、伺服驱动器主要有哪些品牌
欧美:瑞恩、AB、ABB、欧陆、西门子、伦茨、派克、法那科;
日本:安川、富士、三菱、山洋、东芝;
台湾:台达、东元;
国产:华中、广数、时光等
相关延伸阅读:
本文来自投稿,不代表CarMeta立场,如若转载,请注明出处:https://www.car-metaverse.com/202205/15002970.html
如有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至2712335645@qq.com 举报,一经查实,本站将立刻删除。
